

Quadruped Robot Motor can move, run, jump and climb stairs and walk on rough ground, unlike slow laboratory demonstrations. This mobility depends on the performance of the actuators, where the joint motor offers torque, speed, and accuracy control in succession of the quick movement. The gait control requirements include not only power, but also the density of torque, low backlash, fast response, accurate feedback and thermal management. Old-fashioned industrial motors are not adapted to this dynamic. The following sections explain characteristics that enable a motor to be suitable for high-speed gait in legged systems.
High Torque Density for Explosive Joint Movement
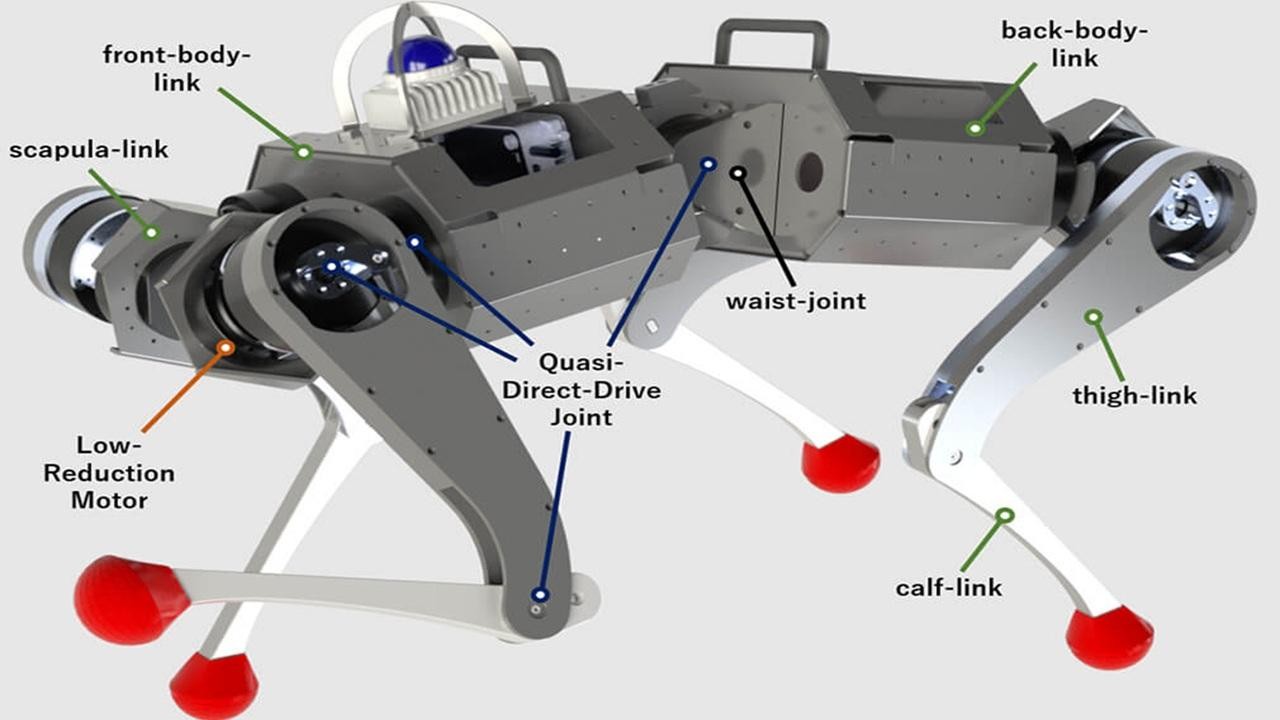
Quadruped robots experience variations in loads during jumping and running. The actuator controls impact forces and maintains joint stability in case a leg strikes the ground. The torque density of a motor enables the motor to offer high output without additional weight and bulk. Torque density is the ratio of the torque to the weight or the volume of the motor. Lightweight joints are essential in legged systems to ensure agility and energy saving. A large actuator is more inertial and difficult to transition between gaits. Older motors have large gear ratios to increase torque, which complicates and decreases responsiveness. Quasi direct drive systems are a combination of a brushless motor and a small planetary gearbox that has high torque with a smaller size, fast stride cycles and dynamic balance.
Rapid Response and Low Rotor Inertia
The gait control requires a high speed of the motor to respond to control commands. During trot or gallop speeds, there is acceleration and deceleration that take place within milliseconds. A motor of large rotor inertia might not be able to accelerate rapidly, which restricts agility. The inertia of the rotor is low, and this enhances responsiveness by lowering the effort input needed to change rotational speed. The motor can also adjust the rate of torque output in real time, depending on sensor feedback, when used with sophisticated servo control algorithms. The traditional industrial motors that are optimized for constant rotational duties might not favor quick acceleration attributes. The dynamic motion of legged robotics necessitates actuators that are optimally suited to the dynamic motion, with response speed having a direct impact on gait stability and coordination.
Low Backlash for Stable Foot Placement
Backlash is the mechanical clearance between gear teeth. Even a slight backlash will cause instability in high-speed locomotion. Minor positional errors on the joint level would be reflected in apparent gait irregularities on the foot. Joints are more precise with precision planetary gearbox systems with less backlash. Integrated motor-gear units reduce the error of alignment usually caused when motors and reducers are fitted independently. The presence of a stable foot position is based on predictable transmission behavior. That decreased backlash, which will provide a more efficient torque transfer to allow the robot to have a constant stride length and contact timing on a number of different terrains.
High-Resolution Encoder Feedback
Proper gait control depends on precise data of joint position and velocity. The feedback of the high-resolution encoders is detailed and enables the control system to control the real-time torque. Dual encoder configurations are considered to be more reliable because they sense the position of the motor shaft and output shaft. Comparing these signals, the controller can identify the discrepancies in the transmission and compensate it. The custom motor systems can demand external encoders and extra wiring, which adds complexity to the system. Tablet encoder packages are easier to use and provide the motion feedback precision needed to coordinate leg movements.
Multi-Mode Control Capability
The quadruped robots are controlled differently based on the terrain and speed. Motors should be capable of position control, velocity control, torque control and hybrid modes, e.g., MIT Control. Particular attention is paid to torque control at the stages of ground contact, when stability depends on the modulation of the forces. The velocity control promotes the swing phases of the leg and makes repositioning of the leg smooth. Adaptive gait transitions are made possible by smooth transitions between the two modes. Robotically-specific motors may have driver boards that can support multi-loop cascaded control. With standard motors, the flexibility might not be as high as with the use of external control modules. Combined control compatibility minimizes the latency and improves the real-time responsiveness.
Lightweight and Compact Mechanical Integration
Each gram of a legged robot has an effect on energy consumption and dynamic response. Smaller actuator modules decrease total limb weight and enhance the location of the center of mass. Integrated quasi-direct drive units are units that consist of a brushless motor, planetary gearbox, encoder, and driver board in one case. This minimizes the complexity of wiring and removes external couplings. The traditional designs have separate motor and gearbox assemblies, which raise the structural mass and assembly effort. Small-scale integration enhances stability and reduces complexity in the mechanical design of robotic joints.
Smooth Torque Delivery and Low Cogging
Cogging torque might result in an imbalanced movement, especially at low frequencies. At times of slow gait or accurate foot position, torque ripple can add vibration. High-tech electromagnetic design and field-control minimizes cogging. The smooth torque output is used to provide smooth leg trajectories and constant interaction with the ground. Non-optimized industrial motors that are not able to achieve precision robotics can have more torque ripple. Smoothness in quadruped robots that carry out delicate operations has a direct impact on balance and the quality of movement.
Robust Protection and Fault Handling
Unpredictable spikes of terrain and loads are faced by high-speed robots. The motors should have inbuilt overcurrent, overvoltage, under-voltage, and overheating protection. The controlled braking response is also necessary. The actuator is required to slow down in a controlled fashion rather than sudden joint collapse in the event of an emergency stop or communication failure. Unified protection systems eliminate the use of extra safety equipment. Fault handling that is reliable is used in research laboratories, industrial inspection and defense robotics to enhance operational confidence and system longevity.
Conclusion
The control of high-speed gait of quadruped robots requires a high amount of torque density, quick reaction, low backlash, accurate feedback, multi-mode control, thermal management, smooth torque, and protection. Conventional motors are appropriate for regular machines, but they are not responsive to dynamic robots. With the proliferation of quadruped robots into other applications, it is important to consider actuator performance that promotes mobility and reliability. An appropriate motor will provide stable, responsive, energy-efficient movement in the complex environment, moving legged robotics forward.










{kind=link}